
鹿明机器人:背包式数采设备开启具身数据规模化采集新时代







作者丨苏建勋
在具身智能领域,“数据获取”是为数不多能达成共识的关键议题。
大语言模型凭借海量数据训练催生了ChatGPT,“Scaling Law”也成为AI从业者的信仰。然而,具身智能所处的物理世界,缺乏互联网般的海量数据资源。无论是人类还是机器人,现实场景中的数据量都难以支撑GPT时刻的复现。
因此,如何获取数据、能获取多少数据以及如何保障数据质量,成为具身智能从业者当前的核心工作之一。
近期,一家机器人公司在数据采集领域推出创新方案。鹿明机器人发布全球首款背包版UMI数采设备FastUMI Pro,并计划于2026年投放1万台设备,在工业、家庭、酒店、餐馆、商场、办公六大真实场景开展系统性数据采集。

全球首款背包版UMI数采设备:鹿明FastUMI Pro(背包版)
UMI(通用操作接口)是斯坦福大学、哥伦比亚大学与丰田研究所联合提出的低成本数据收集与学习框架。与市场上的遥操数采不同,UMI可与机器人本体解耦,意味着训练数据能适配多种机器人形态。
在2026年初的媒体交流会上,鹿明机器人创始人兼CEO喻超对比了UMI与遥操的效率和成本:
“以叠衣服为例,遥操作数据采集需50秒,成本3-5元;使用FastUMI Pro仅需10秒,成本低于0.6元,采集效率大幅提升,成本显著降低。”
鹿明机器人成立于2024年9月,创始人喻超曾任追觅具身机器人业务负责人,拥有近10年研发经验,主导了小米CyberDog的研发与千台量产。联席CTO丁琰是大陆最早研究UMI的专家,首次将UMI从实验室推向工业界。
兼顾规模与质量
2025年,鹿明通过自建数采中心实现10万小时的数据产能。喻超预测,2026年头部具身模型的数据规模将不低于100万小时。
鹿明2026年的核心目标是建立年采集百万小时的UMI数据产能,这要求采用更规模化的采集手段获取更多数据。
“机器人训练数据不应如此昂贵稀缺。人类在物理世界作业产生的数据无处不在,只是未被有效收集。”喻超表示。
背包版FastUMI正是为解决这一问题而生——它是便携的标准数采工作站,能高效将真实场景操作转化为高质量训练数据。
此前的具身数据采集多依赖实验室或单一场景,导致机器人在单一场景重复动作,数据缺乏多样性,影响模型泛化能力。
因此,鹿明希望通过更轻便的采集方式,将工具装进背包,降低真实场景数据采集门槛。
在场景覆盖上,鹿明计划涵盖工业、家庭、酒店、餐馆、商场、办公六大核心场景,细分30个小类任务,构建结构化、多维度的操作数据体系。
“采–训–推”一体化闭环是鹿明数据基础设施的核心。此次规模化采集依托已打通的基建体系:FastUMI Pro助力鹿明双臂具身机器人MOS在5小时内完成工厂质检“数据采集-策略训练-模型推理”全流程验证;在合肥部署后,仅7小时便跑通真实场景的采集、训练与部署推理。
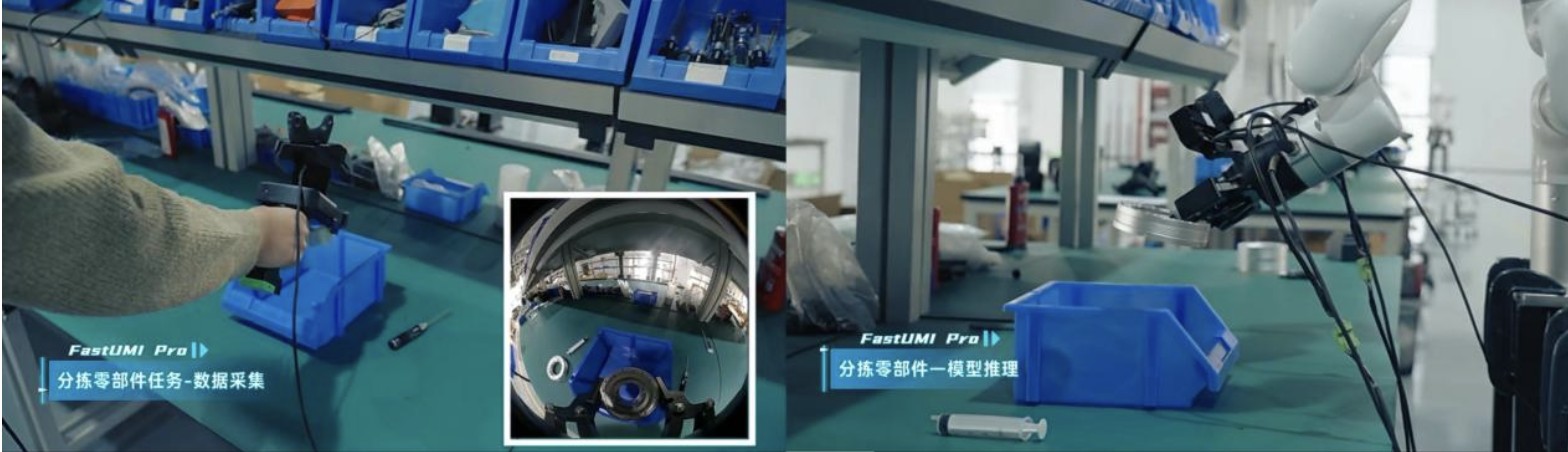
FastUMI Pro在分拣零部件任务中,完成“数据采集-策略训练-模型推理”闭环
数据先行,模型后立
除背包式采集工具外,鹿明还建立了“数据超市”,将采集数据转化为可流通的标准产品,客户可在官网采购标准化操作数据。可见,作为具身智能公司,鹿明当前战略重点围绕“数据”展开。
鹿明的一系列动作,反映了具身智能当下的核心业务需求。
在年初的媒体沟通会上,联席CTO丁琰向《智能涌现》等媒体分享了对数据与模型的见解。
“我出身模型研发,之前训模型时发现,要训出好模型必须有完善的数据管线,包括生产、评估、筛选,而建立过程本身需要时间。”丁琰说。
摸清行业现状后,丁琰和团队决定,若模型与数据二选一,优先选择数据,不能直接训模型。
“因为模型架构最终比拼的是数据质量,这是行业共识。”丁琰强调。
具身智能的能力上限高度依赖真实操作数据的规模与质量。当通用数据可在线下单,行业模型训练门槛降低,具身智能才能从定制化探索走向工程化生产。
从“万台设备同步采集”到“通用数据电商化”,鹿明正将物理世界中“无处不在却未被收集”的操作数据,转化为可规模供给的标准化基础设施,构建数据驱动的生态系统。当数据不再稀缺,机器人才能真正走向通用。
end
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com