
宸境科技发布具身智能新品牌LooperRobotics及全栈技术矩阵,拓展空间智能边界




此次发布包含Insight全自主空间智能相机、TinyNav高性能导航算法库以及RoboSpatial空间编辑工具链,这标志着企业在具身智能的关键感知硬件、底层算法与应用工具链领域取得重要进展,为机器人成为继汽车、手机之后的物理任务基础设施筑牢了技术根基。
一、聚焦复杂物理场景,打造机器人“空间智能”基础平台
当前,人工智能正快速从数字领域向物理世界延伸,具身智能作为物理AI的典型形态,是连接数字与物理实体的纽带,也是助力制造业转型的关键技术。不过,如何让机器人在复杂多变的真实环境中拥有高精度的感知与决策能力,实现从实验室到车间、家庭等场景的规模化应用,仍是行业普遍面临的难题。
宸境科技此次发布的“LooperRobotics”品牌体系,致力于通过软硬件一体化的自主创新,构建驱动通用机器人的标准化感知底座。
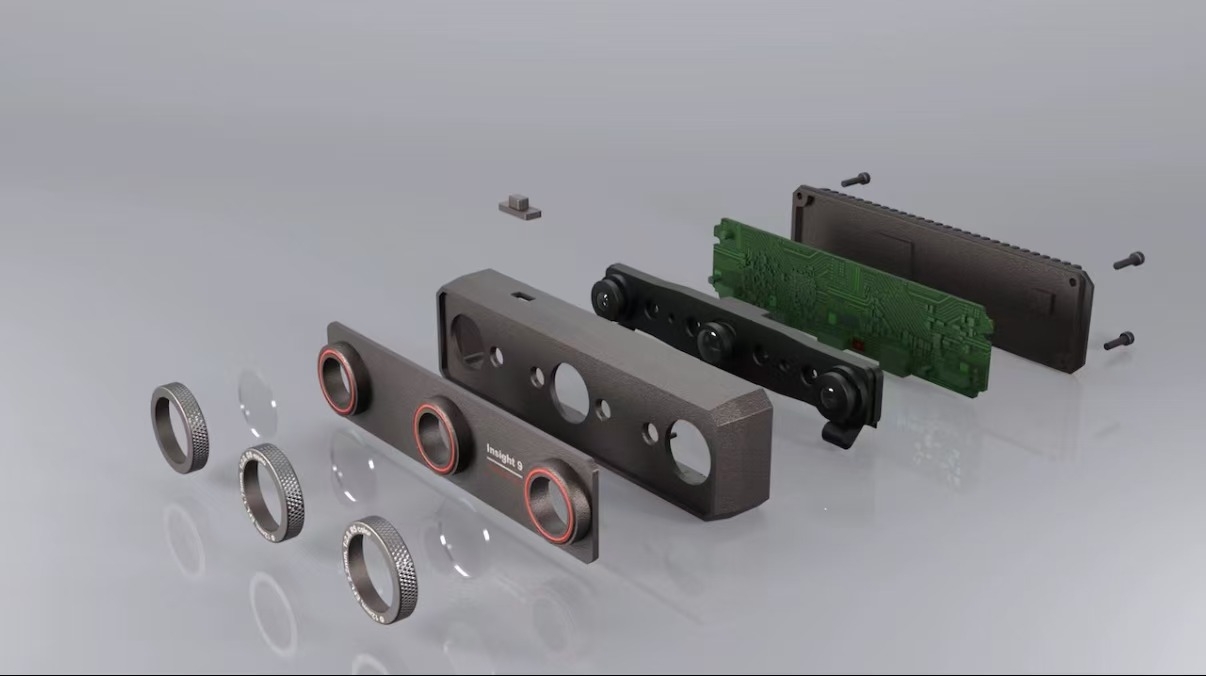
发布会上推出的Insight全自主空间智能相机,是本次发布的核心亮点之一。
作为具身智能的核心数据入口,Insight全自主空间智能相机凭借四大技术优势,重新定义了行业感知标准:
其一,端侧算力内闭环:内置10TOPS NPU算力,可在相机端完成SLAM算法与AI双目测距的协同运算,保障感知数据的处理效率。
其二,全域纵向视场:采用188°超广角镜头与纵向增强布局,消除感知盲区,实现环境信息的全景覆盖。
其三,毫秒级实时响应:依托边缘计算架构,AI推理速度达到毫秒级,让机器人具备类生物本能的快速避障能力。
其四,工业级环境适应性:具备24g抗震性能与强光抑制功能,确保机器人在颠簸、复杂光照等极端工况下仍能保持高精度的位姿输出。
这种高性能、低功耗的集成方案,为具身智能提供了标准化的感知源头。
作为Looper Robotics的“导航核心”,TinyNav高性能导航算法库提供了一套开箱即用的机器人导航系统。TinyNav可直接输出控制信号,让各类构型的机器人平台具备“即插即用”的智能移动能力。
在功能方面,TinyNav赋予机器人稳定的局部感知与自主定位能力,支持未知环境下的安全探索、实时建图及长时记忆管理,确保机器人在无监督条件下持续稳定运行。其技术核心是一套面向机器人训练的生成式世界模型(Generative World Model),通过少量真实场景数据即可生成大量高保真合成数据,从根本上提升了机器人决策系统的泛化能力与稳定性。

RoboSpatial空间感知软件平台具有极强的软硬件兼容性,通过模块化设计形成开箱即用的软硬一体化方案,帮助机器人厂家跳过复杂的底层开发流程,快速获得核心技术能力。这一创新不仅解决了传统机器人开发门槛高、周期长、适配难的行业痛点,还通过构建机器人专属的“空间知识库”,实现环境信息的结构化存储与智能调用。

二、“空间即服务”创新模式,凸显多元应用价值
宸境科技联合创始人兼CEO胡闻指出,在物理AI框架下,智能体需要具备对物理世界的高维度重构能力。宸境科技围绕这一需求,构建了以Insight相机为感知入口、RoboSpatial平台为时空基座、TinyNav引擎为认知核心的技术闭环,并提出“空间即服务(Spatial AI as Service)”的全新理念。该技术矩阵通过软硬件协同,将碎片化的物理信号转化为结构化的空间智能,赋予机器人理解物理逻辑的“空间直觉”。
若说汽车是移动基础设施、手机是信息基础设施,那么机器人有望成为未来的“物理任务基础设施”。宸境科技的软硬一体“空间直觉”方案与“空间即服务”创新模式,将为产业链上下游提供标准化的基础设施支持。
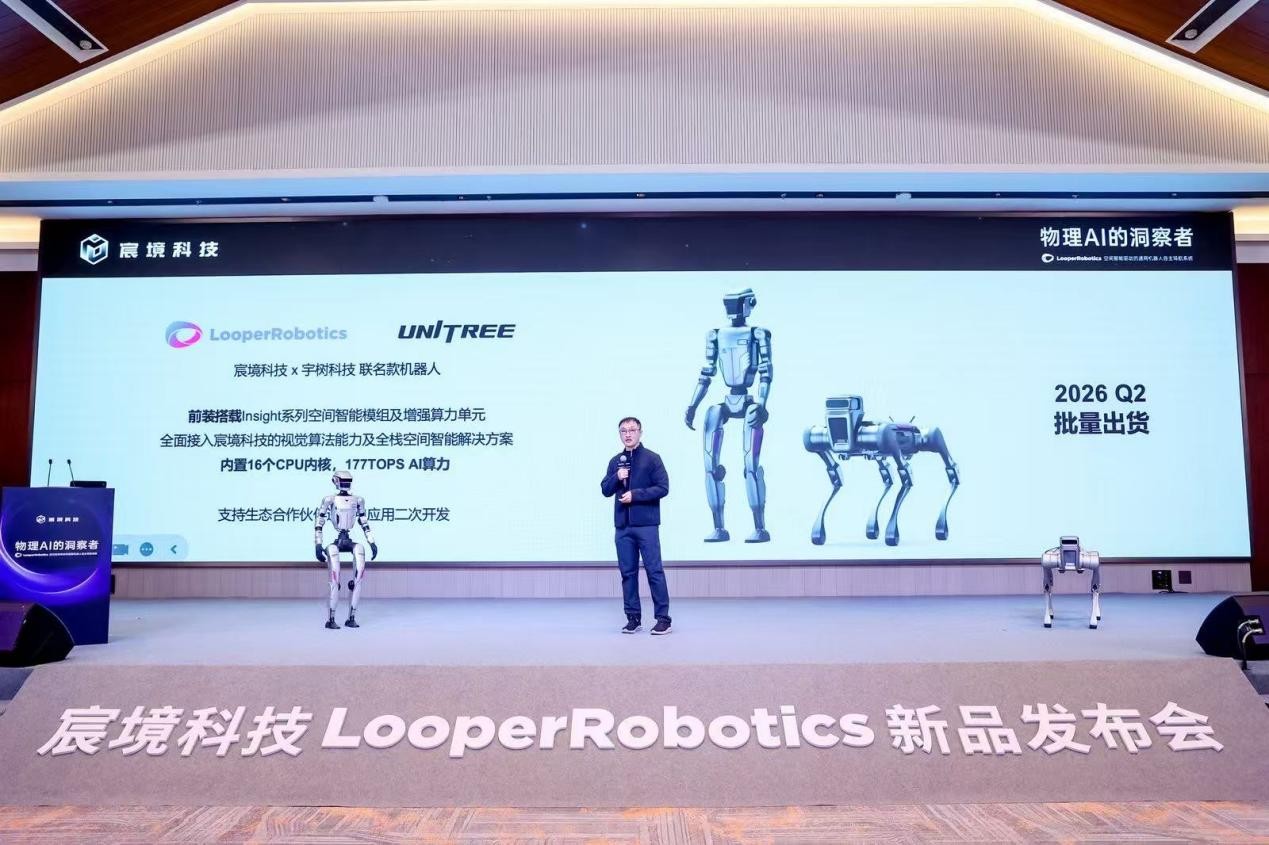
发布会现场,宸境科技展示了与宇树科技、地瓜机器人等行业头部企业的合作成果。搭载全栈空间智能方案的人形机器人与四足机器人,展现出出色的自主导航与交互能力,验证了该技术在工业巡检、物流配送及公共服务等领域的广泛应用潜力。
此次全栈解决方案的发布,不仅填补了相关领域的技术空白,也体现了我国科技企业在推动产业链协同创新中的积极作用。
宸境科技推出的矩阵产品,破解了机器人“看得见、走得通、用得好”三大核心难题,有望推动具身智能加速融入实体经济,成为助力经济社会数字化、智能化转型的重要力量。
更多发布会产品信息可通过官方渠道了解:
LooperRobotics官网:https://www.looper-robotics.com
TinyNav高性能导航算法库:https://github.com/UniflexAI/tinynav
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com