
宇树的机器人又进化了,学习哪种跳舞,还可以挑战平衡木。







不仅可以在春晚扭秧歌,还可以模仿科比的后仰跳投,再现 C 罗的腾空半转身。
前阵子,宇树科技的人形机器人,可谓出尽风头。
因此,在几天之前,他们家的机器人又进化了。
梅花桩挑战,不一步踩空,走得端正。

不但可以正着走,倒着走也如履平地,这换个真人来也未必能做到。

尽管平衡木走出了一种醉酒的感觉,但至少也没有摔倒。

还有更加华丽的,舞一曲哪吒的《天雷滚滚我好害怕》
希望机器人能给老人以后,看看 G1 如今也开始学习推轮椅。

如果是夸张的话 G1 按照这个月几次进化的速度,或许明年就可以进入我们家当保姆了。
但是,这些新技能,事实上,宇树的员工并没有亲自调试过。
像前面挑战梅花桩一样 G1 ,便是上海 AI 实验室结合了国内几所顶尖大学,共同研究成果。而且那个蹭到了哪个热度的人。 G1 ,还来自上海 AI 实验室和其他机构的手。
所以世超这次也研究了一波两篇论文,发现这两篇论文一种可以使人形机器人挑战高难度地形,另一种可以降低远程操作机器人的成本。
可以说,这两项研究成果,为现阶段人形机器人在运动控制、数据收集、成本等方面的难题提供了更新的解决方案。
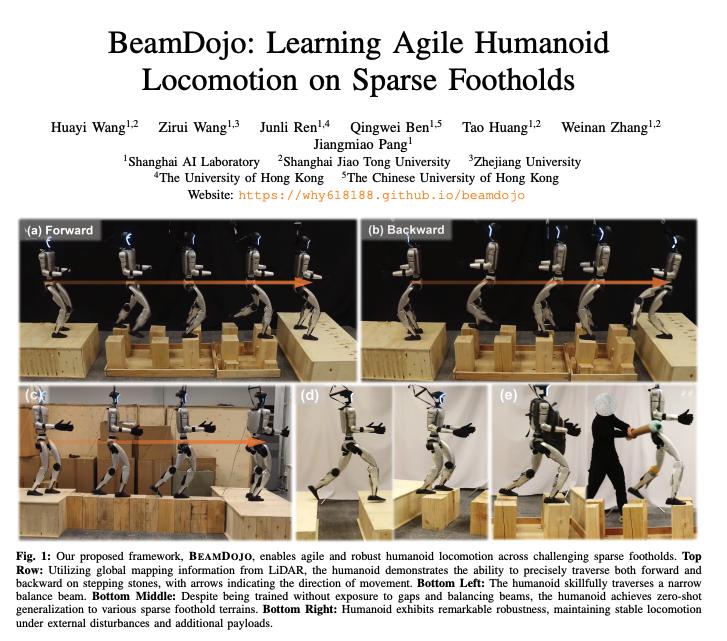
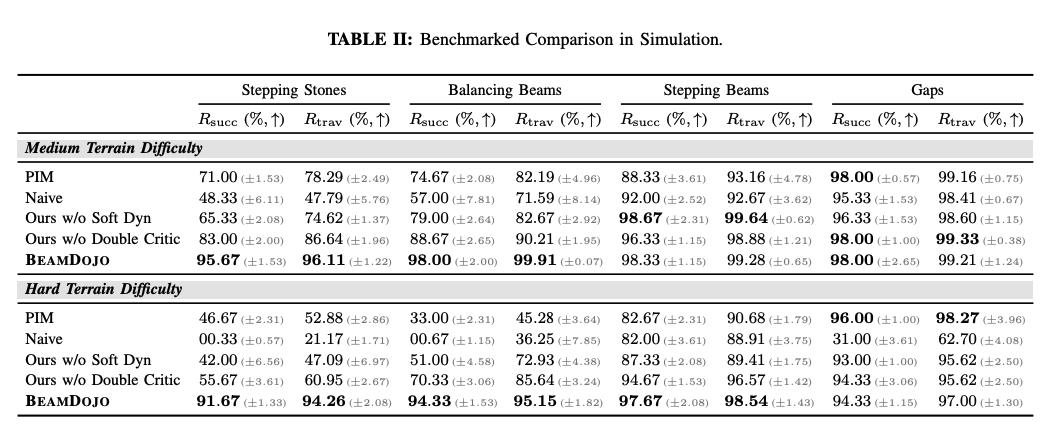
我们先来看看第一篇论文,《 BeamDojo : Learning Agile Humanoid Locomotion on Sparse Footholds 》( BeamDojo :学习敏捷类人在稀疏立足点的运动)。
里面有两个地方还挺值得一唠的。
之前复杂地形的实验大多是针对四足机器人的,脚的形状和人形完全不一样。即使有人形机器人的练习,效率也不高,但 BeamDojo 敲重点便是“人形机器人”“复杂地形”“高效”。
还有一点,就是零样本泛化这一举一反三的能力。
因此 BeamDojo 加强学习框架,设计一种专门针对人形机器人的训练方法,使机器人能够在复杂的地形上快速稳定地行走。
例如,在训练过程中,研究人员引进了一名研究人员。落脚点奖励制度。
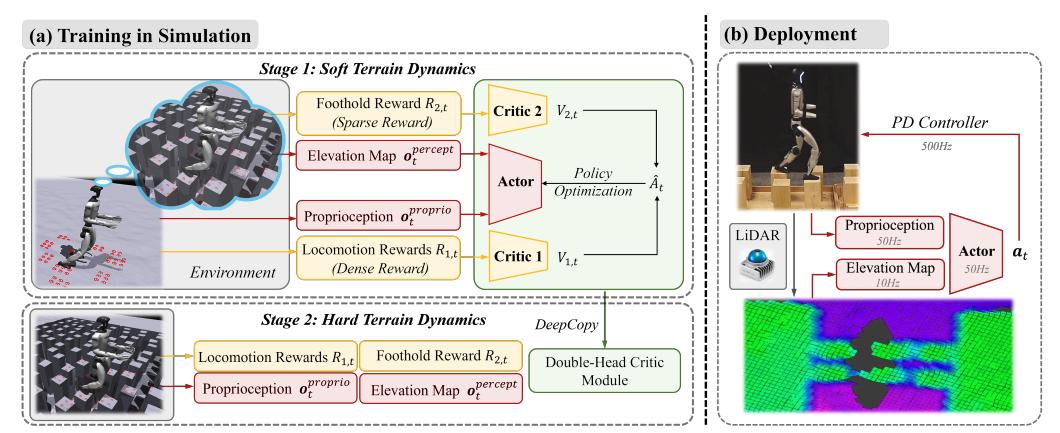
可结合地形数据和机器人脚底的取样,计算其踏出的每一步,是否踩在安全区域。
假如大多数采样点都在安全区域内,自然会得到奖励,反而会受到惩罚。
另外,本文的实验还提到了从模拟环境到现实世界,BeamDojo 零样本泛化的成功率具有 80%。
也就是说,经过模拟环境的训练,到了真实的地形,就不需要额外的微调了,机器人也有很大的机会走得又快又稳。
这一能力对机器人至关重要,因此也成为当今学术界和行业的主流研究内容。
像 AI 在此之前,大神李飞飞和她的研究团队发表了一篇论文,“数字表亲”可以使机器人零样本泛化的成功率达到 90%。
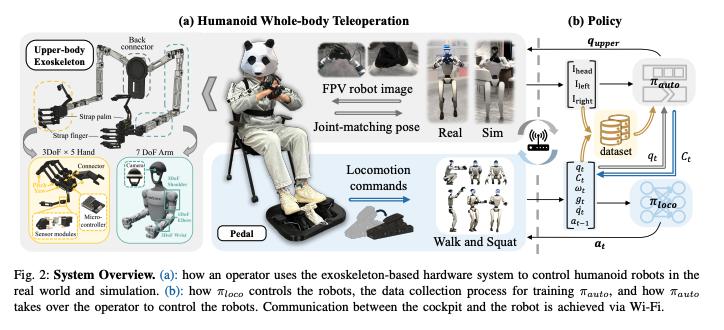
另外一篇论文,介绍的实际上是一个人形机器人远程控制系统。
这个跟上一次斯坦福一样,也是远程操作。 Aloha 机器人不同。以前只是控制手臂,但是上海 AI 实验室的 HOMIE ,可以控制机器人全身的自由移动。
实现的原理大概是设计一套外骨骼设备(机械臂、智能手套、踏板),让研究人员可以通过这个“驾驶室”全身控制机器人。
该系统的强化学习框架还涉及三项核心技术:专业学习上身姿态,高度跟踪奖励对称应用。。
专业术语听起来很吓人,但是理解这个概念并不难。
像上半身姿态专业学习,就是让机器人学习更多、更复杂的上臂动作。
高度跟踪奖励和训练狗一样。让机器人蹲下或站在一定的高度,达到目标就能得到奖励。归根结底,对称应用是使机器人左右两侧的动作更加和谐和一致。
外骨设备的硬件成本是最重要的,只需 3500,人民币。
这个机器人的成本远低于其他同样是远程操作计划的机器人。比如斯坦福 Aloha 机器硬件的成本, 3.2 在当时看来,万美元已经算得上是比较低的。
所以这样的对比,显得更加明显。 3500元是穿透地板价格的出现。
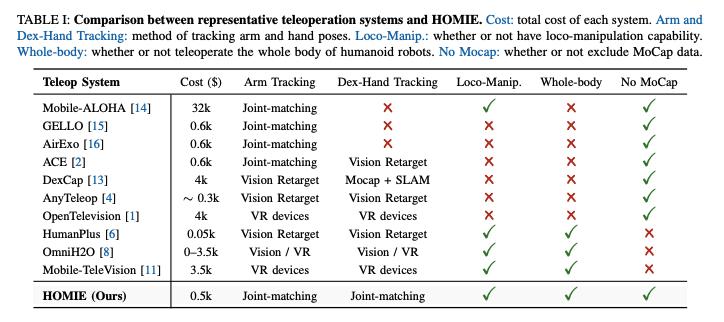
而且从数据收集的准确性来看,也会比较 VR 设备方案要高一些(文章中有和和 OpenTeleVision 进行比较)。
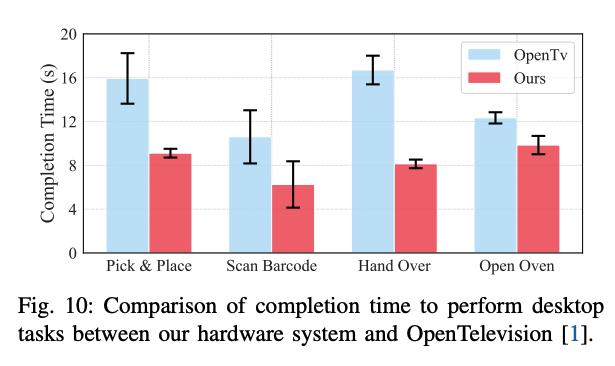
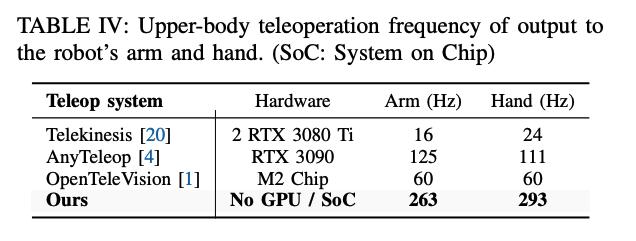
所以世超觉得,HOMIE最大的贡献之一,也许就是找到了一个成本低,精度高收集机器人数据的方法。
看看,不管是什么 BEAMDOJO 强化学习框架,或者 HOMIE 控制系统,这些前沿研究,都是针对的有智力的疑难病症去的。
不可否认,目前的具身智能还远未达到,科幻电影中的完美对比。
但是现在的机器人特别相似,十年前的 AI 。那时,没人预料到, ChatGPT 、 DeepSeek 什么,出现 AI 视频、 AI 音乐,更是天方夜谈。
由于大多数技术探索,我们平时也无法接触到,所以只有在质变发生后,我们才会恢复活力。
结合今年年初机器人行业的新动态,世界超级赌博是第一手,更不用说大规模应用了,但今年一定看了一些机器人的灵活性和适应性。
前几天,宇树科技的王兴兴没有说,预计年底他们家的人形机器人 H1 跑步速度,即将达到, 10m/s 。这个速度,和博尔特相比。
总而言之,我们就等着看吧。
图片,资料来源:
上海人工智能实验室微信官方账号,电影《机械公敌》截图
《HOMIE: Humanoid Loco-Manipulationwith Isomorphic Exoskeleton Cockpit》
《BeamDojo: Learning Agile Humanoid Locomotion on Sparse Footholds》
https://homietele.github.io/
https://why618188.github.io/beamdojo/
本文来自微信微信官方账号“差评X.PIN作者:西西,编辑:江江&面线 ,36氪经授权发布。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com