
辅助驾驶,不再是性价比游戏






辅助驾驶已经成为中国汽车工业进入智能化下半场的核心战场。
近年来,大量汽车公司下注「伪性价比」路径-用尽可能少的硬件资源堆叠更多的功能模块:拨杆变道,记忆停车,高速 NOA、城市 NOA…这些能力直接进入商品传单,却很难扛起真实可用的感觉。
这种玩法曾经被视为效率的体现,也符合要求。「中国制造」长期以来「成本控制-感觉领先」行业逻辑。
然而,现实迅速揭示了它的局限性:性能瓶颈、功能抽签、使用体验分离、极端工作条件下失效...这些问题正在消耗用户的信任。
行业举起「性价比」旗帜试图用有限的计算能力和带宽来支撑越来越复杂的功能需求。因此,系统很难升级,甚至在长尾场景中。「罢工」。
这种产品与用户之间形成「需求移位」:顾客渴望的是「托付感」,而且市场交付的是「 Demo 感 」。
更为重要的是,一套真的「可以托付,可以规模化」辅助驾驶系统,远非拼几个功能模块那么简单,它必须要有一整套从底层平台到上层能力的系统工程。
如今,辅助驾驶需要告别。「性价比想象」,从 功能列举,价格贴近百姓,转化为底层算率和系统性能。 领先于核心感受。
安全性不再是辅助驾驶的选择,而是新阶段的门票。
01安全,不是辅助驾驶的加分项,而是及格线
辅助驾驶的真实底层,不是智能,而是安全。
全部「看上去炫」的 AI 能力,最后都要落到最后。「关键场景是否可以自我保护」这是个问题。
但是那些低成本的堆叠功能,压缩冗余设计「性价比方案」,常常在关键时刻掉链子:
高速 NOA 不能丝滑并道,变成摆设;
城市 NOA 无法识别突然插入的行人或非机动车,造成误判;
在夜间、雨雾等极端工况下,感知融合响应延迟。「罢工」。
这种「看得见但不可靠」感觉,本质上是为了换取宣传功能而牺牲性能,一旦发生意外,汽车公司将面临控制、责任和口碑的多重危机。
今年 6 本月,国家标准信息公共服务平台发布了《智能联网汽车组合驾驶辅助系统安全要求》,征集了强制性国家标准项目的意见,明确了从运动控制到驾驶员干涉、系统边界、检测能力、功能安全的通用技术标准,也规定了典型工作条件的检测方法。
这个政策为辅助驾驶划定了更清晰的安全底线,也意味着行业监管正在从事。「鼓励创新」逐步转向「督促合规」。早期的「容错窗口」很快就关掉了,过去那种「PPT 交付」开发模式,将被完全淘汰。
强制性标准不仅提高了准入条件,而且宣布「堆叠功能-讲故事」的辅助驾驶 1.0 阶段结束。
因此,冗余计算率、冗余模型、冗余决策逐渐成为行业新共识。
新一代特斯拉 AI5 芯片性能被推到极限,一个可以达到极限。 2000~2500 TOPS,目前几乎是主流芯片 10 倍数,甚至超过两台英伟达达 DGX Spark 超算。
蔚来的神玑 NX9031 芯片,相当于 4 颗 Orin-X,已在 ET9、ET5、EC6 等待车型大规模落地。
小鹏 G7 Ultra 三个版本搭载的自研图灵芯片终于超越了力量。 2200 TOPS,属于同级别车型 3~28 倍,可以同时支持智驾大模型和驾驶舱大模型的即时运行。
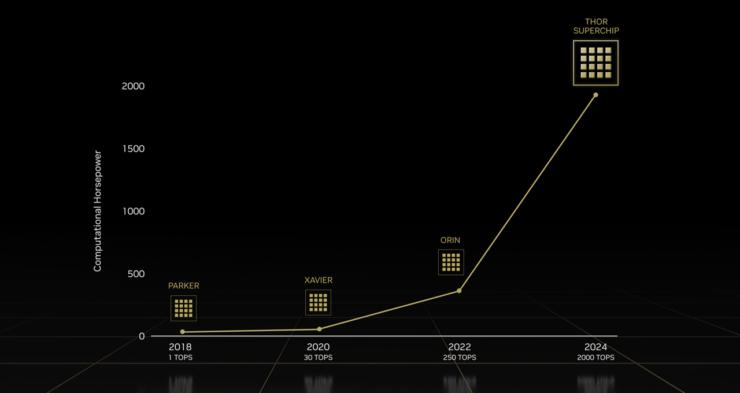
尽管芯片自主研发缓慢,但其焕新版本 L 这个系列已经配备了英伟达 Thor 保证高级辅助驾驶系统的稳定性,旗舰芯片。
在天神之眼平台上,连比亚迪还引入了英伟达高性能芯片,并发出了明确的技术转型信号。

这类硬件冗余不是奢侈,而是底线。创始人何小鹏曾经说过: 「买车先看算率」,逐渐成为 AI 汽车消费者时代共识 。
辅助驾驶不是 PPT 上面的展示,需要通过展示,「真实界限情景验证」工程系统。但是在工程闭环中,只有性能冗余,才能支撑真正可用的智能体验。
02使辅助驾驶落地,系统平衡性能、安全性和成本。
辅助性驾驶能否大规模落地,关键不在于功能酷炫,而在于是否具备工程交付能力。
行业逐步形成共识:要实现规模布局,必须构建「铁三角」架构—— 安全体系 × 性能支撑 × 成本规模化 。
德赛西威执行副总裁李乐乐在第十七届轩辕汽车蓝皮书论坛上指出:「安全平权是辅助驾驶平权的前提,安全技术的普及是最大的平权之一。」
「平权」这并不意味着存在 10 一万元车型的简单堆叠功能,应该是 30 在万元级技术平台上逐步下沉能力,「安全与体验」成为所有价位段用户都可以触及的基础,而非高价配置。
因此,每个家庭都需要走向量产化的辅助驾驶计划,同时必须具备三重能力:
安全体系 : 智能驾驶安全生命线的基础是构建功能安全、网络安全、预期功能安全等安全系统能力组合辅助驾驶的安全底座。
高性能支撑 :计算率大,带宽高,模型大,可解决长尾问题,帮助驾驶场景,提高驾驶安全性。
成本规模化 :实现跨车型复用,通过平台化、规范化、模块化,降低边际成本。
辅助性能,不仅仅是堆芯片拼算率,更取决于整个平台能否高效运行。
算率只是「发动机」,真正决定系统性能的,还有数据传输有多快,算法响应有多顺利,以及在关键时刻能否立即做出决定。
更为重要的是,计算能力需求的提高不是线性的,而是指数级的跃升。
在今年 CVPR 会上,小鹏世界底座模型负责人刘先明指出, L2 到 L3 跨越,不仅仅是功能复杂度的提高,更是计算能力需求的质变。
就当前主流方案而言,L2 级别系统一般依赖 80~300 TOPS 计算率,用于车道维护、自动巡航等任务; L3 该系统需要面对开放的市政道路、复杂的交通参与者和动态环境,必须依赖数千人。 TOPS 等级以上计算率,支持大规模神经网络即时推理。
这不但是从「规则系统」到「认知系统」技术飞跃,也是整个平台的飞跃。「算率×带宽×大模型」能力提出新的要求。
可以堆积芯片计算率,但是带宽越来越成为性能瓶颈。
黑芝麻科技 CEO 单记章指出,未来性能突破的关键在于带宽架构的创新,例如选择 Hyperband 等技术,将 DRAM 与计算逻辑封装相结合。「存算一体」设计可以显著提高带宽,降低成本。
这意味着仅仅通过提高计算率很难解决系统瓶颈。如果带宽有限,即使理论计算率很高,也很难支持大模型的高频推理和即时决策。
许多业内人士认为,随着大模型的全面性「上车」,整个行业对计算率和带宽协同能力的要求将继续上升。计算平台能否顺利承载模型运行和系统演变,将成为辅助驾驶。「拼系统」核心战场。
03大模型上车,不是为了炫耀技巧,而是为了让系统真正做到。「懂情景」
在过去,辅助驾驶的逻辑是「感知,规划,控制」: 看清楚,做动作,少犯错误。 。
而且大型车型的引入,带来了接近人类驾驶员的「理解语义的能力」:
能够识别前车行为的意图,如变道趋势;
能理解「非结构化障碍物」,例如漂浮的塑料袋和静止锥桶;
可以在多目标动态交互中动态管理路径决策,例如应对骑电动车过马路的老年人。
这一能力不能通过传统的规则体系来实现,必须依赖。「 多模态×高参数×持续学习 」大模型机制。
小鹏的 VLA VLM 双模式方案,将环境感知和路径预测交给高精度视觉和多模式模型,可以应对夜间、雨天等极端场景,甚至可以通过广告牌、地标等视觉信息在缺乏定位环境的情况下完成精准导航。
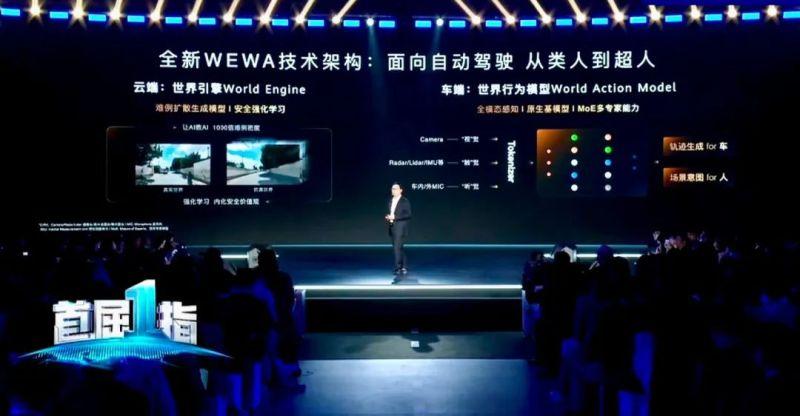
华为乾崑 ADS 4 将于今年秋天推送,「世界引擎 世界性行为模式」声称端到端延迟的架构 减少 50% ,提高通行效率 20%,正从「效仿人类」迈向「超越人类」。
大型模型不是炫耀技能,而是构建「可靠性交付,持续进化」辅助驾驶平台的关键钥匙。
辅助驾驶的发展,正走向第三阶段:
第一阶段是「功能战」: 谁更便宜谁赢 ;
第二阶段是「感受战」: 谁更顺滑谁赢 ;
第三阶段是「安全战」: 谁更值得信任谁赢 。
一个真正完善的辅助驾驶系统,不是看它是否识别红绿灯,而是看它是否在极端情况下拯救了一条生命。这就是「安全平权」真正的含义。
行业必须认识到:安全,从不具有性价比。,「托付感」是智能驾驶时代的核心产品。
为了实现这种信任,我们必须回到技术基础。——安全性更高,必须依靠性能更高的计算平台。
在「感受战」之后,行业进入了这个行业「安全战」。
从决策冗余到模型容错,从长尾场景到极端环境下的响应,每种能力的落地都要以计算率为基础。没有足够的计算率,就没有足够的安全冗余。一旦关键时刻失败,即使只有一次,用户信任也会被彻底摧毁。
高安全性和高计算能力,不再是技术和感觉。「两张皮」,它构成了辅助驾驶的核心理念「一体两面」。
AI 时代的智能汽车不是炫耀技术的平台。它以高性能完成了辅助驾驶安全的普及,让每个人都能平等享受到智能带来的安全效益。这才是中国智能汽车产业后半段真正的价值起点。
本文来自微信微信官方账号 “汽车之心”(ID:Auto-Bit),作者:赵悦鹏,36氪经授权发布。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com