
宇树机器人打斗打嗨,接着呢?








不要看博茨的对决,CMG是纯爷们应该看的比赛。
作为目前世界上最受欢迎的机器人格斗比赛,连续20多年的博茨对决已经成为一代人的记忆。但是这个比赛中出现的机器人基本都是轮足类型,攻击方式比较简单,可以点燃观众的热情,但是很难做出复杂的操作。
近日,全球首个人形机器人格斗大赛由中央广播电视总台承办。《CMG 世界机器人大赛系列赛机甲格斗挑战赛隆重开幕,宇树科技旗下的Unitreeee人形机器人 G1亮相,一场充满科幻感的比赛瞬间引发热议。

今年4月,北京人形机器人半程马拉松比赛举行时,未参加比赛的宇树科技表示,他们正在为人形机器人格斗比赛做准备,所以没有亲自参加比赛。半程马拉松主要考验人形机器人的稳定性和耐力。格斗比赛是对机器人平衡性和灵活性的全方位考验,两者的差距就像中考和高考。
在这场比赛中,人形机器人行业究竟发展到了什么程度,直观地展现出来。
马达,算法立功,机器人上演“李小龙附身”?
格斗比赛中的格斗和抬腿等操作都伴随着重心的偏移。击中目标后产生的反冲也会导致机器人重心不稳定,这对机器人来说是一个严峻的考验。
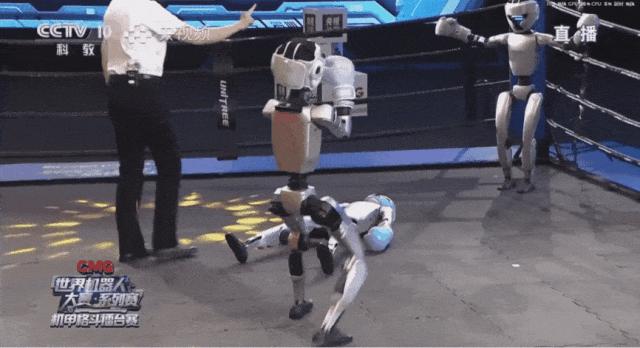
UnitreeeCMG参赛选手 G1在球场上确实有几次攻击都没有击中对手,反而摔倒了,但是可靠性和平衡性还是超出了小雷的预期。比如下图中的战斗画面,双方拳击防御姿势稍微试探了一下后侧踢对方腹部。虽然有重心不稳定的迹象,但随后稳定性恢复,后撤保持距离,调整姿势面对对手。

受伤倒地后,Unitree G1只需不到5秒就能成功站起来,站起来的动作和人类没什么区别,会用单手撑地的姿势,甚至因为感觉不到疼痛而更加流畅快捷。
Unitree 在行业内,G1稳定性、平衡性、灵活性均表现良好的关键在于软硬件能力。硬件方面,Unitree G1配备的深度相机和3D激光雷达可以准确感知自己的状态。专业版23个关节电机和EDU版23-43个关节电机赋予了Unitreee。 G1极其灵活,其中单臂有三个肩关节、两个腕关节和两个腕关节,单腿有三个髋关节、一个膝盖骨和两个踝关节。
在人形机器人各部件的成本中,控制人形机器人运动的电机可以排在第二或第三位,一般只有扭矩传感器的成本高于电机。Unitree G1配备的电动机为自研内转子无刷电动机,能提供较强的功率密度和控制精度,使用寿命比有刷电动机长。
行业一直在争论机器人液压和电机哪个方案好。如今,电机方案胜过液压方案几乎已经成为共识。就连液压策略的忠实粉丝波士顿动力也转向了电机方案。
高达数十个电动机,让Unitree G1到处都是极其灵活的关节,但是还需要一套方案来控制到处的电机协调工作。

为了解决这个问题,宇树科技与上海人工智能实验室、上海交通大学联合开发了具有智能控制学习算法的HoST,通过多评价强化学习、平滑正则化、隐藏速度约束三大模块来评价机器人的能量效率和关节负载,通过约束空间持续性来降低机器人在运动过程中的高频抖动。与传统方法相比,运动振动幅度可降低60%以上。
通过加强游戏引擎动力学方程的学习方法,可以限制机器人关节的加速度和最大速度,以满足硬件的性能界限,从而在复杂的环境中保持重量和稳定,并以28种姿势站立。
以IMU(惯性测量单元)实时监控机器人的姿势和状态,并通过算法有效控制机器人的几十个关节。它是Unitree。 G1能在格斗比赛中长期保持稳定,展示专业格斗技巧的关键。但是,这并不意味着Unitree G1足够完美,恰恰相反,Unitree G1仍然很难解决最重要的问题。
四肢足够发达,大脑仍然简单。
当一些网民对CMG比赛中的机器人操作感到兴奋时,一些网民认为它的噱头大于实际。由于参赛机器人不是按照流程和指令自动对战,工作人员需要使用摇杆进行遥控。
据《科技创新板日报》报道,宇树科技机器人使用的格斗动作从外部人员那里收集数据,供AI大模型学习和参考。嵌入式算法由比赛团队自主研发,复杂的操作需要现场摇杆控制。就这样,比赛中出现了很多有点搞笑的画面,比如两个机器人疯狂输出气体,主动进攻时重心几次不稳摔倒。

据《科技创新板日报》报道,不少业内人士表示,机器人底层算法已经相当出色,但缺乏真正的空间智能模型作为机器人大脑。
严格来说,轮足机器人在续航和稳定性方面都优于两足机器人。公司尽最大努力打造两足机器人,因为两足机器人更贴近人。大型AI模型的训练需要大量的数据,两足机器人可以利用人类的日常动作图像数据进行练习。
目前的问题是,机器人使用的基本算法和硬件越来越成熟,但在机器人AI模型中的应用远不完善。今年3月,AI公司Anthropic联合创始人和政策主管Jack Clark表示,机器人产业即将进入GPT-2阶段,这是一个类似于生成式AI模型的早期发展阶段。
参照ChatGPT的发展过程,可能需要一年时间才能实现机器人AI大模型。「能用」等级,大约三年的时间,才能实现。「好用」等级。
进入2025年后,国内外企业纷纷推出适用于机器人AI的大型模型,如谷歌Geminini。 Robotics和Gemini Robotics-ER、Figure AIHelix等,不仅可以实现对设备关键身体的高速连续控制,而且可以使机器人操作从未见过的物体。
智元机器人是国内机器人公司发布的第一款通用车身底座模型——启元大模型。该模型基于ViLLA架构,结合多模式大模型和混合专家架构,可以通过人类视频进行训练。它具有快速泛化小样本的能力,实施五项复杂任务的平均通过率提高了32%。

Unitree G1接入的UnifoLM是宇树科技自主开发的AI模型,具有多模态感知能力。它可以根据视觉图像识别物体的形状、位置和颜色,并通过自动管理能力规划抓取路径。在抓取过程中,还可以根据力觉传感器反馈的数据进行调整,避免损坏物体,节省能耗。
但就像Jack一样 根据Clark的说法,完善机器人AI模型需要很长时间。玉树科技创始人王兴兴去年8月表示,大型机器人模型的路线并不像大型语言模型那样清晰,企业觉得自己做不到,无论投入多少钱,都很难取得太大的成绩。因此,行业在R&D的投资相对受到抑制,这可能需要一点财富和一个有才华的人来促进。
适用于机器人AI模型不成熟,导致机器人可以在特定场景下完成指定任务,但不能快速泛化,扩展到更多任务。在机器人格斗比赛的场景中,遥控器比AI模型更可靠。机器人行业的复杂性让很多企业不敢投入太多资金去开发大模型。
幸运的是,这个行业有很多公司勇于尝试,大量企业已经进入国内外。一些企业,如启元大模型,一般都是开源AgiBot。 World数据,工具链,预训练模型,加快行业完善。机器人AI模型正处于快速发展时期,任何企业都已成为机器人行业的OpenAI。、DeepSeek的可能性。
距离完美的机器人,至少还有五年?
尽管在CMG比赛中,Unitree G1出现了几个重心不稳摔倒的场景,但整体平衡已经超出了小雷的预期,尤其是摔倒后平稳起床的动作,几乎和人类一样。
Unitree G1的缺点也很明显,依靠手柄操作使消费者对其实用性和比赛意义产生了质疑。实际上,Unitree G1支持三种操作模式:遥控、语音控制和体验控制。但是语音控制的延迟太高,在格斗比赛中很难发挥作用。宇树科技开发了一套体验控制系统,可能会在后续比赛中使用。

万丈高楼始于垒土,Unitree 尽管G1在格斗比赛中的表现并不能让每个人都满意,但是技术是在一次又一次的尝试中走向成熟。2025年被称为人形机器人量产的第一年。宇树科技、智源机器人、优秀必选等国内公司都在为大规模量产做准备。王兴兴在去年8月的一次采访中预测,机器人行业距离「iPhone时刻」不超过5年。
大量机器人AI模型的出现也将加速机器人行业的完善。也许几年后,人类机器人的价格会降低到普通消费者可以接受的范围,功能也会满足我们生活场景的一些需求。
对于人形机器人格斗比赛来说,是企业检测机器人产品质量技术实力的机会。博茨对决证实,关注这类比赛的人不在少数,提前布局有机会获得更多流量,增加品牌知名度。体验控制推出后,参赛选手可以像科幻电影一样控制机器人,这也将大大增加比赛的观赏性和话题性。
本文来自微信微信官方账号“智能Pro”,作者:失魂引,36氪经授权发布。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com