
宇树G1又炫技,脚踩梅花桩如履平地,网友:疑似少林寺训练内容流出。








宇树G1在被质疑为AI产生的那样之后,人形机器人再次练习少林功夫。
机器人展望2月19日报道,今天,上海AI实验室、上海交通大学、浙江大学、香港大学、香港中文大学联合发布了一项新成果。——BeamDojo加强学习框架,这是首先可以使人形机器人在落脚点稀疏的危险地形上实现精细落脚点控制的基于学习方法。
走在落脚点稀疏的危险地形上,如踏脚石和平衡木,对机器人的腿部运动来说是一个巨大的挑战。机器人需要准确处理感知信息,准确放置安全区域的步伐,并在整个过程中保持底座稳定。 ,只有这样才能灵活安全地移动。
具体而言,技术难点主要有两个方面:
- 四足机器人已经解决了行走在这个落脚点稀疏的危险地形上的问题,但是很难将同样的方法应用到人形机器人上。因为大多数四足机器人的脚是点状,但是人形机器人的脚通常是多边形,多边形脚并不适合为点状脚设计的落脚点奖励。
- 在研究人形机器人运动的基础上,在复杂的地形和精细的落脚点上,仍然存在许多问题,对步伐放置进行评估的奖励信号非常稀疏,学习过程效率极低,难以获得可靠的感知信息。
所以,研究小组开发了BeamDojo加强学习框架,可以使人形机器人在稀疏的落脚点上灵活移动。
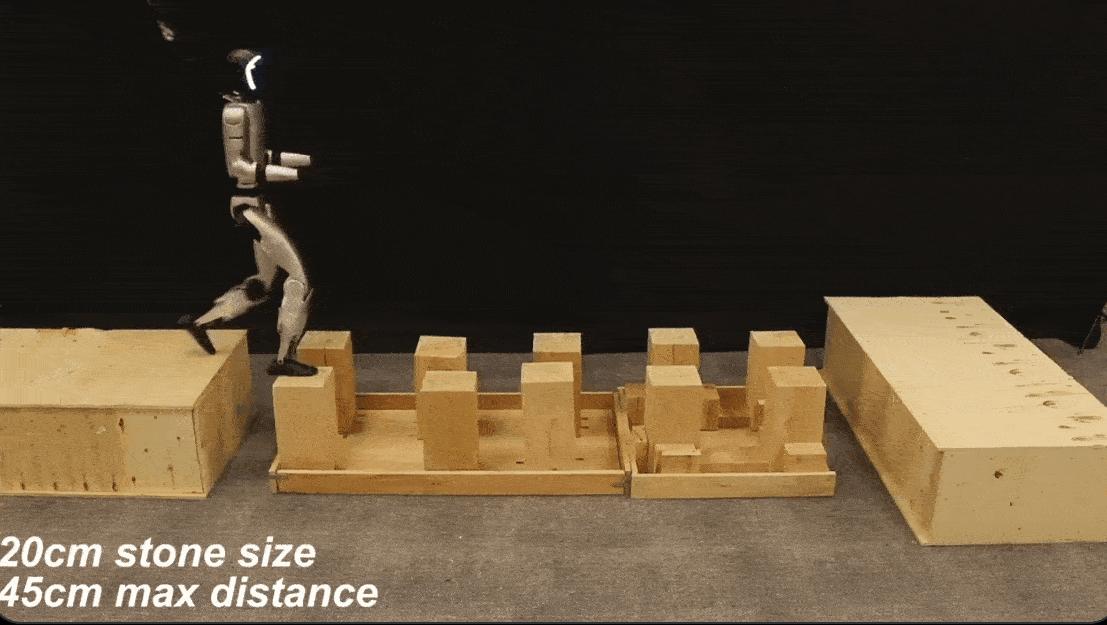
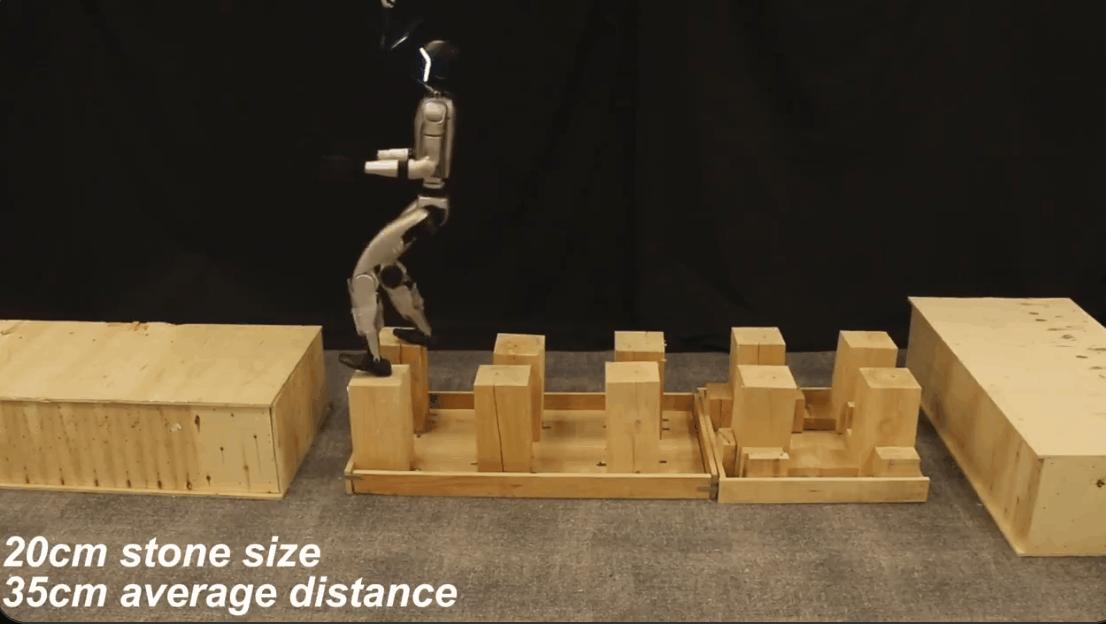
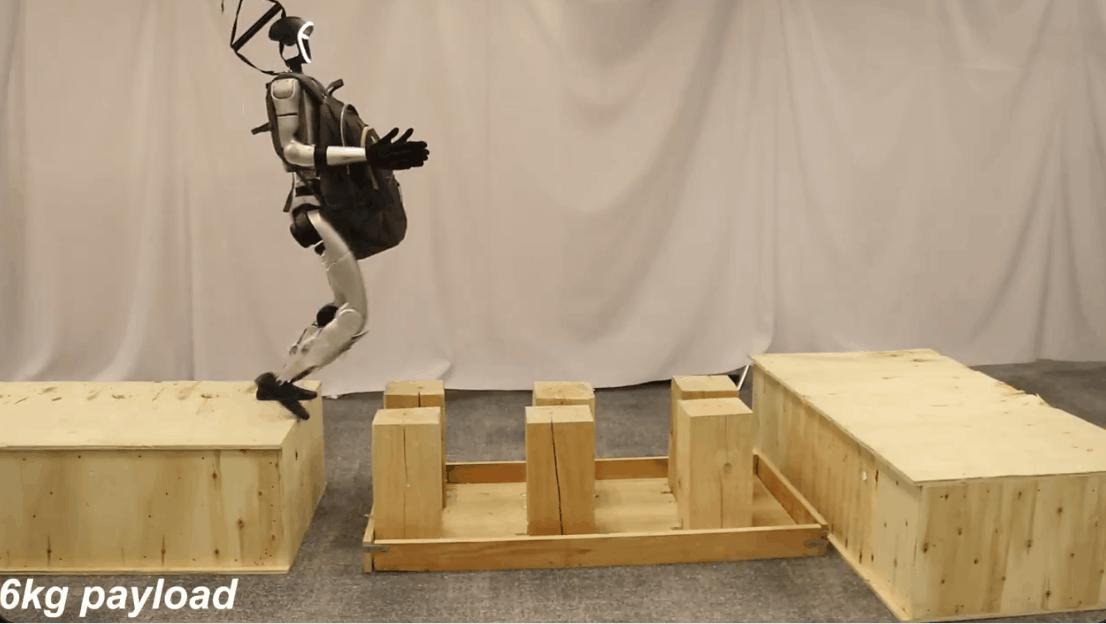
在演示中,G1可以像梅花桩一样稳定地穿越许多面积约20厘米宽、间隔不同的踏脚石。甚至,它也可以后退穿越踏脚石。
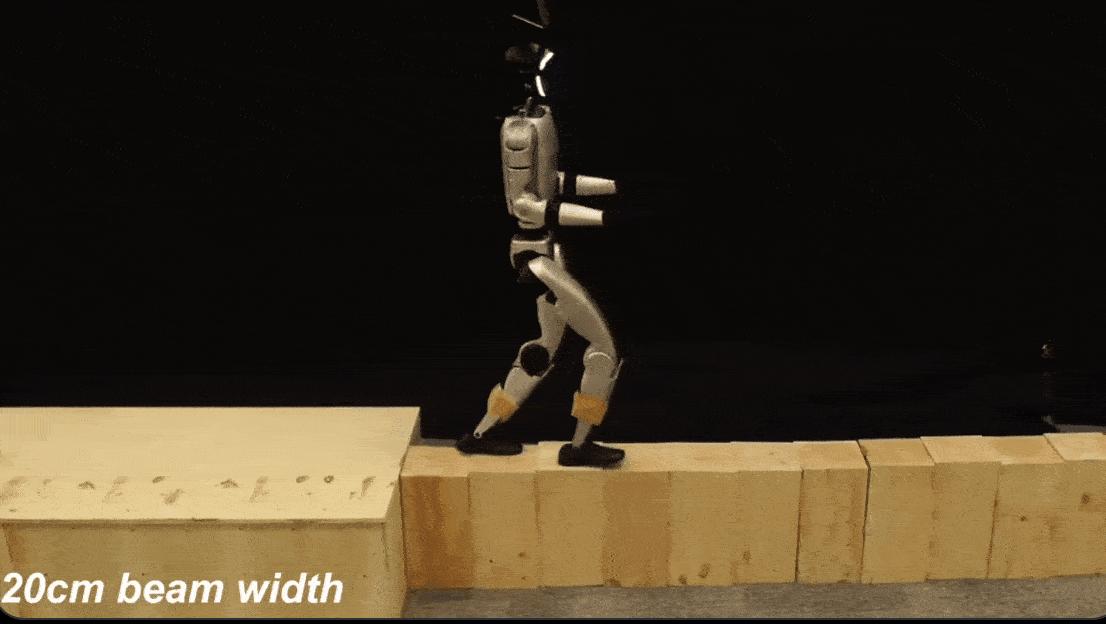
平衡木20厘米宽度的挑战也不在话下。
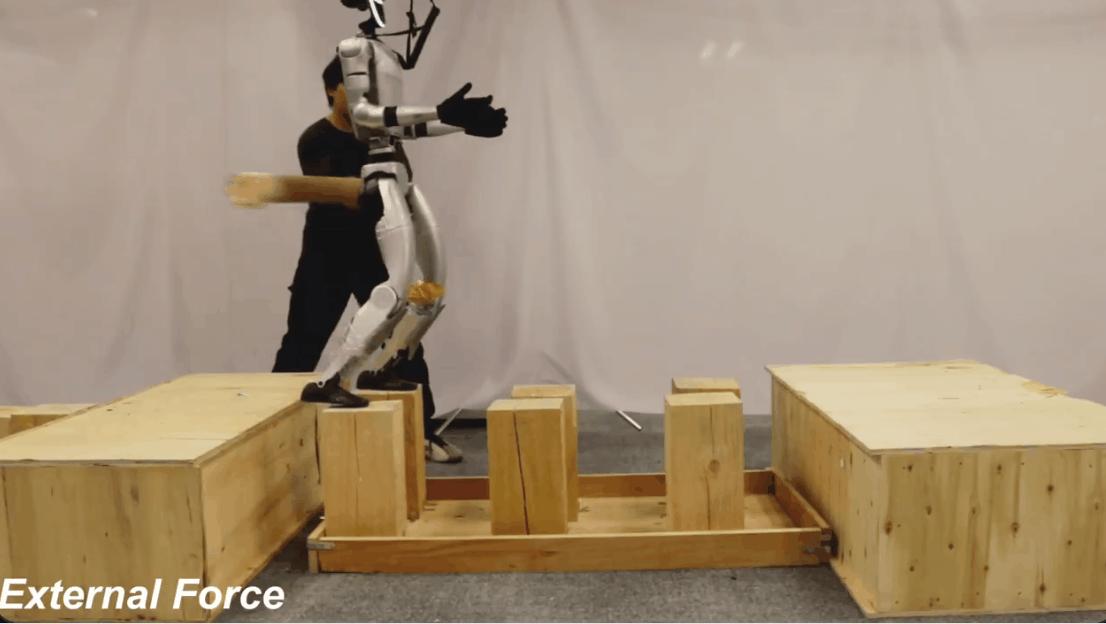
就平衡而言。G1即使在承受6公斤重物、受外力影响的情况下,也能很好地穿越这些复杂的地形。
最新评论:越看越像人形机器人去少林寺训练学习,怀疑是中国功夫片的情景流出。

根据Huayi Wang介绍,这一框架主要有以下创新:
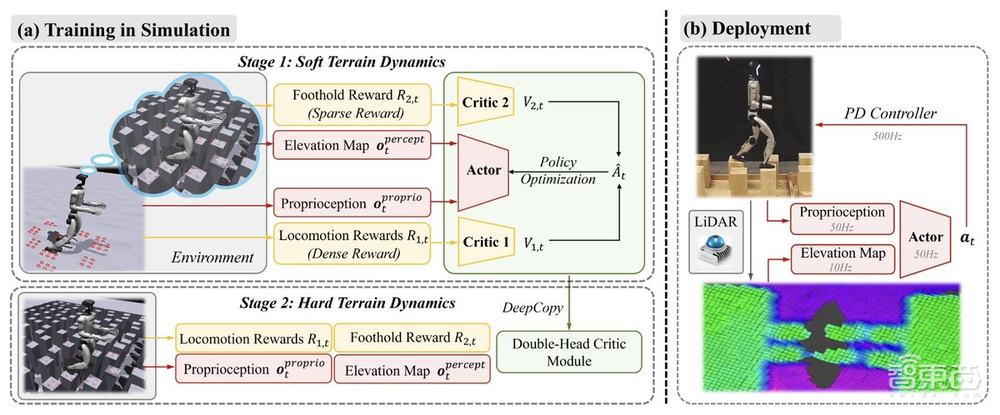
- 制定了强化两个阶段的学习训练策略,使机器人学习更加高效。让机器人在第一阶段平地练习,通过输入地形参数,让算法在安全环境中预先学习;第二阶段切换到在实际任务地形中优化战略。
- 研究小组为多边形脚板量身定做。基于采样落脚点奖励制度,并采用“双评价器”(double-critic)结构,以平衡稀疏落脚点奖励间密集移动奖励的学习过程。
- 搭载基于高程地图系统激光雷达,使机器人能够实时感知地形细节,为精确落脚提供数据支持。
- 能够实现零样本泛化,尽管G1在训练过程中并没有接触到稀疏的地形和平衡木,但是它可以对各种稀疏的地形进行零样本泛化。
实验表明,BeamDojo已经在模拟环境中完成了高效的学习。在现实世界中,这个框架也可以使人形机器人在稀疏的落脚点上准确地落脚和灵活地移动,并且在受到很大外界影响的情况下保持较高的通过率,并且可以进一步应用于更具挑战性和复杂的地形,如山谷。
本文来自微信微信官方账号的“智东西”(ID:zhidxcom),作家:许丽思,编辑:漠影,36氪经授权发布。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com