
武汉无人车“停滞”背后:被误读的安全逻辑




武汉“萝卜快跑”无人车因路面停摆引发热议。
3月31日晚,武汉部分“萝卜快跑”无人驾驶车出现路面停摆情况。
交管部门与工作人员迅速到场处置,乘客安全下车,无人员伤亡,交通秩序及时恢复。
事件引发网络持续讨论,公众好奇自动驾驶车辆为何突然“停滞”。
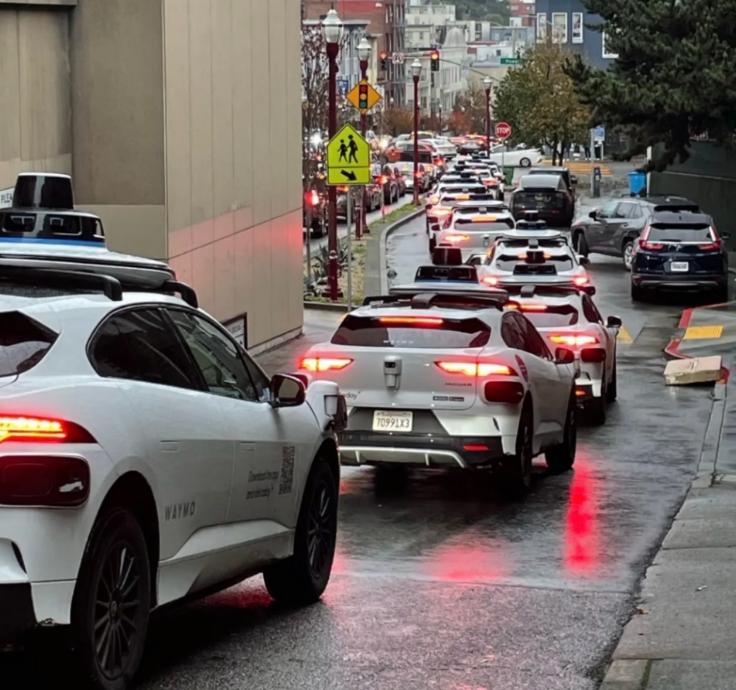
类似场景曾在数月前美国Waymo的大规模停摆事件中出现,这并非偶然。
无人车“停滞”的底层逻辑
据知情人士透露,萝卜快跑的停摆是车辆自检到潜在风险时,系统为保障安全采取的主动策略。
要理解这一现象,需跳出人类驾驶思维,从自动驾驶系统运行逻辑分析。
人类驾驶依赖经验与预判,面对复杂场景可能“赌一把”;而AI驾驶的核心逻辑是“必须确定安全”,通过多重安全冗余设计保障运行。
安全冗余体现在感知、决策、执行三个层面:
感知层:主流L4无人车配备激光雷达、毫米波雷达、高清摄像头等多传感器,融合数据实现环境感知。
决策层:关键系统采用主备双计算单元,传感器数据分歧时进入“验证模式”,确保决策置信度。
执行层:当系统无法高置信度决策时,启动“最小风险策略”,安全平稳停车,这是行业通用的安全底线。
这种“停滞”属于“降级措施”,类似飞机自动驾驶仪在异常时切换模式或交予人工操控,是对安全的负责任处理。
机器严格遵循规则选择最安全动作,即使看似“保守”,这正是自动驾驶区别于人类驾驶的核心价值。
无人驾驶需要“必要停顿”吗?
公众疑问:安全设计能否更“丝滑”?答案需结合自动驾驶发展阶段分析。
以萝卜快跑为例,截至2025年2月,其累计出行服务超2000万次,覆盖26个城市,自动驾驶总里程超3亿公里(含1.9亿公里全无人驾驶里程),是全球少数能大规模全无人运行的玩家之一。

即便如此,边缘场景下的“谨慎停滞”仍不可避免。这如同新手司机“宁停三分”,是系统积累经验、拓宽场景的必要过程。

每一次停滞都会被记录分析,优化算法,推动系统迭代。这种真实场景打磨是自动驾驶的进化方式,行业顶尖企业对此已形成共识。
2025年12月旧金山停电导致Waymo车辆停摆,其解释为系统将失效信号灯视为“四向停车”场景,因规模超预期触发最小风险策略,这也是加州对L4级无人车的强制安全要求。
可见,“停下来”是法律与技术共同规定的安全防线。虽短暂影响交通,但技术变革需与公众认知、社会规则磨合,自动驾驶早期偶发停滞属合理范畴。

衡量无人驾驶技术成熟度,需理性看待发展规律:追求“永远不出事”是理想终点,更应关注企业的兜底响应与迭代能力。真实场景暴露的问题,最终会成为系统升级的“疫苗”。
本文来自微信公众号 “智能车参考”(ID:AI4Auto),作者:杰西卡,36氪经授权发布。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com