
GEIS硅谷大会现场复盘:具身智能正迎来关键发展节点





本文来自微信公众号: 硅谷101 ,作者:硅谷101
4月28日,原本横跨不同赛道、分属不同话语体系的从业者们齐聚硅谷,共同参与了一场行业盛会。
这场盛会就是由魔法原子发起、硅谷101联合主办的「全球具身智能创新大会」,缩写为GEIS。作为具身智能领域首个全球性高端峰会,本次大会以“CONNECT”为核心主题,首次将前沿技术发布、行业前瞻对话与全球生态链接整合到同一平台。
大会不仅集中展示了当下具身智能技术的最新研发成果,还通过多场专题研讨与跨界交流,深度拆解了具身智能在算法、硬件、落地应用层面的核心痛点,梳理了智能机器进入真实场景的可行路径,进一步推动了科研院校、产业企业与投资圈之间的联动协作。
接下来我们就一起梳理本次大会的核心亮点内容。

图为硅谷101联合创始人陈茜
01
图灵奖得主Martin Hellman:AI落地物理世界,安全是底层核心要求
大会开场环节,图灵奖得主、密码学先驱Martin Hellman带来了主题为《安全、智能与物理世界的交汇》的主旨分享,从系统安全的底层逻辑出发,解析了机器人进入物理世界需要面对的安全、可靠性与信任体系建设问题。
他首先回顾了公钥密码学的诞生过程与实际价值,这项技术不但是当下电子商务、软件系统、区块链网络的安全基础,更是数字世界信任机制的核心支撑。
谈到人工智能发展,Hellman没有直接给出乐观或悲观的结论,而是强调AI发展本身具备双重属性:AI毫无疑问会持续优化人类生活,但同时也可能引发系统性风险,甚至有部分学者将其视为和核战争同级别的潜在威胁。更关键的是,AI的发展进程无法停滞,因此核心问题不是要不要发展AI,而是如何通过制度设计与国际合作,保障AI的发展始终服务于人类整体利益。
最后,他将密码学、国际安全与人工智能三条线索汇总到同一个核心命题:当智能系统开始进入物理世界,“安全”已经不再是单纯的技术问题,而是一项覆盖信任、治理与全球协作的系统性工程。

图为图灵奖得主Martin Hellman
02
圆桌研讨:机器人“身体”与“大脑”的最新研发进展
随后,大会围绕具身智能落地的技术细节、商业化路径与工程难题展开讨论,设置了“具身智能本体进化”与“具身智能大脑革命”两大专题论坛,分别对应机器人的两大核心组成部分:控制运动的“小脑”与负责决策的“大脑”。
|“小脑”进化:感知、控制与灵巧手技术
第一场技术论坛聚焦具身智能感知与控制的底层基础。当前阶段,机器人本体设计、精细操作与运动控制是具身智能落地的核心研究方向,以魔法原子为代表的行业企业,正在从底层推进机器人硬件的全栈系统化布局,目标是推动具身智能从实验室走向真实场景,最终实现规模化落地应用。本次论坛中,各位嘉宾也分享了不少全新的技术进展与实践思路。
英伟达GEAR Lab高级研究科学家Zhengyi Luo介绍了团队刚刚发布的Sonic模型。他将运动追踪类比成人形机器人领域的词语预测,和大语言模型依托海量文本的词序规律完成能力扩展一样,人形机器人也可以通过大规模人类运动数据库,实现行为能力的规模化提升。在世界模型的框架中,Sonic承担的是逆动力学模型的角色,它可以将世界模型生成的状态序列转换为关节扭矩,走完从预测到执行的最后一步。
在触觉感知方向,亚马逊前沿AI与机器人研究院科学家HaozhiQi提出,当前触觉传感器的硬件成熟度仍然落后于算法发展。受硬件条件限制,哪怕是人类不需要视觉辅助就能完成的精细操作,机器人加入视觉输入仍然能提升效果,这是当前硬件现状决定的技术策略。他提到,团队目前的方案是将所有可用的感知模态同时输入神经网络,让网络自主学习不同任务中哪些信号是有效的,等未来传感器硬件成熟后,算法策略也会对应调整。

主持:JaneLiu(硅谷101)嘉宾:ZhengyiLuo(Nvidia GEAR实验室)、HaozhiQi(亚马逊前沿AI与机器人研究院)、Evan Tao(Chestnut Robotics创始人)、ZizhengLi(XGSynBotCEO)
灵巧手的技术路线选择也是本次大会的核心议题之一。Chestnut Robotics创始人、前Tesla Optimus灵巧手核心成员Evan Tao系统性梳理了行业内连杆、腱绳与直驱三大主流路线的优缺点:
-
连杆手起源于假肢领域,优势是耐用性强、工程设计简洁,但天生存在灵活度不足的问题。
-
腱绳手参考生物学设计,模仿人类前臂肌肉通过肌腱将力传递到手指的结构,代表产品Shadow Hand的关节数量接近人类人手,但机械结构复杂,可靠性与成本都是很大的挑战:目前Shadow Hand的售价高达15万美元,是市面上价格最高的灵巧手方案。
-
直驱方案是近年兴起的新方向,依托高能量密度小型电机的发展,直驱方案可以把驱动单元直接集成到每个关节,结构更简洁,但在力传导效率和热管理方面仍然存在工程难题需要解决。
Evan Tao表示,Chestnut Robotics选择了混合架构路线,融合三种方案的设计优势,在灵活度与工程可靠性之间寻找平衡。
针对机器人如何实现规模化应用的问题,XGSynBotCEO ZizhengLi也提出了两个核心观点:第一,机器人需要从“单一功能设备”升级为“多任务通用平台”,通过类似Quick-change的模块化系统,让同一台机器人可以在不同工序之间灵活切换,以此提升生产与应用场景的整体效率和灵活性;第二,要实现这个目标,数据是核心基础设施。他的团队采用“混合数据策略”,结合大规模模拟数据、互联网数据和少量高质量真实场景数据,在控制成本的同时提升模型能力与泛化性。
|大脑革命:数据、世界模型与真实场景适配
本次论坛还讨论了具身智能的“大脑”相关问题。仿真数据与真实场景数据的优劣之争,是具身智能领域争论时间最久的技术议题之一,本次大会上,多位嘉宾分享了自己的判断。
HaozhiQi认为,两种数据来源各有适用范围。仿真数据更适合训练单一的反应性技能,但如果是做早餐这类需要长期规划与语义理解的复杂任务,仿真环境很难提供足够丰富的场景支撑,必须引入真实场景数据,再结合大语言模型完成任务结构的分解与调度。
OpenMind创始人、斯坦福大学生物工程副教授JanLiphardt则认为:要尽早把机器人放到真实场景中测试。他提到,每次把机器人移出实验室,都会出现一系列连锁问题:激光雷达被阳光干扰、地面湿滑打滑、铰链生锈、多任务同时运行导致电力系统过载、机器人倒地等等。但他认为,这些在受控实验室环境中无法预测的故障,恰恰是最有价值的训练信号。
魔法原子总裁顾诗韬介绍了公司在真实数据采集方面的核心优势。她提到,新能源汽车制造业是目前最典型的数据富矿:因为产品迭代速度快,60%到70%的组装工序仍然需要人工完成。魔法原子已经在苏州、无锡、武汉、深圳、广州等地的工厂开展系统性数据采集,目前日均采集量超过1.6万条,高质量数据规模突破100万小时,覆盖超过100家战略合作伙伴、一千余个真实应用场景,形成了从数据采集到模型优化再到真实场景反馈的正向循环。
03
魔法原子发布三款全新产品
本次大会上,魔法原子推出了三款全新产品,分别覆盖具身智能的决策、感知与执行三大核心能力。
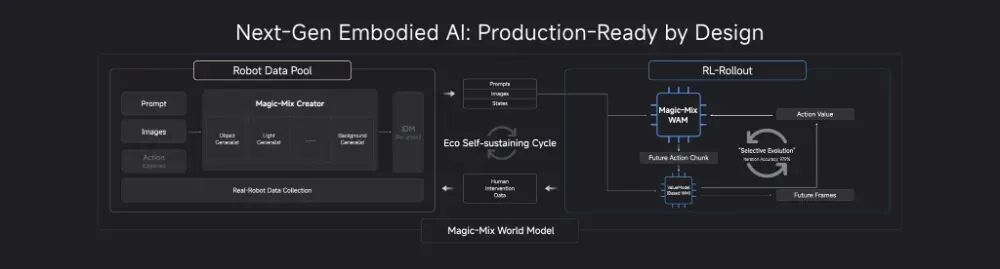
Magic-Mix世界模型
魔法原子发布的自研世界模型Magic-Mix,是本次GEIS最核心的技术发布之一。
过去VLA大模型离开实验室后很容易出现性能失灵的问题,Magic-Mix要解决的正是这个底层问题:让机器人真正理解物理世界,而不只是记住动作指令。Magic-Mix由两个引擎组成:WAM引擎负责空间推演与动作决策,Creator引擎持续合成训练数据,两个引擎互相配合形成了“生成数据→训练模型→反馈迭代”的闭环。
Magic-Mix的发布也意味着魔法原子在机器人“大脑”层面完成了更深度的技术布局,核心目标是让通用机器人逐步具备“理解环境—推演未来—选择动作—反馈迭代”的全链路能力,为工业柔性生产、商业服务、家庭健康等复杂场景的自主作业提供核心支撑。
MagicHandH01灵巧手
作为本次发布的核心硬件之一,MagicHandH01主打精细操作能力,技术配置完成了全面升级。它拥有20个自由度、44个高分辨率三维触觉传感器,整机重量1公斤、额定负载10公斤,力重比达到10:1。安全设计是H01的核心差异化优势:它可以在触碰物体前的0-40mm就完成感知、预判动作,硬件闭环响应低至5毫秒,这也确定了它在人机近距离协作场景下的安全优势。
MagicBotX1旗舰人形机器人
本体硬件方面,魔法原子本次推出了旗舰级人形机器人MagicBotX1。这款机器人身高180cm、体重70kg,采用航空级铝合金与钛合金材质,整机运动速度相比上一代提升30%,31个主动自由度让运动范围扩大超过50%,无限续航双电系统支持7×24小时连续作业,分为面向商业部署的标准版和面向高校、实验室与开发者的科研版,科研版支持底层二次开发。
最后,魔法原子总裁顾诗韬还在大会上首次对外公布了魔法原子的长期目标:到2036年实现140亿美元年收入。她同时透露,目前公司订单积压已经达到1亿美元,2026全年收入目标为3亿美元。公司宣布未来五年会持续投入10亿美元,搭建面向机器人二次开发的开放生态。本次大会现场,魔法原子还和硅谷AI企业Openmind、PrismaXAI、CosmicbrainAI、Physis等生态合作伙伴完成签约,进一步扩大了全球生态布局。
04
跨界交流:从实验室走向真实生活
除了技术论坛,本次大会还邀请到了旧金山前市长Willie Brown、中国音乐人张艺兴等跨界嘉宾到场参与。
旧金山前市长Willie Brown在发言中从公共治理的角度,强调了具身智能这类前沿技术对社会生产力和人类生活方式的潜在重塑作用。他指出,目前很多决策者对技术发展的认知仍然滞后,没有充分意识到技术带来的机遇和影响,这是未来需要填补的核心差距。在他看来,政府和政策制定者需要更主动地了解科技进展、倾听产业和科研界的声音,才能在机遇与风险并存的发展阶段,推动技术真正成为推动社会整体进步的动力。
本次大会,中国演员、歌手、音乐制作人张艺兴也来到现场,和多款机器人完成互动,近距离感受了具身智能的发展速度。
这些来自不同领域的跨界互动也让我们感受到,具身智能的影响已经不再局限于技术圈,开始越来越多地获得不同行业、不同领域人群的关注。
图为魔法原子机器人MagicBot Z1与中国演员、歌手、音乐制作人张艺兴
大会临近尾声时,OpenMind的创始人JanLiphardt分享了一个真实发生的故事。
他们曾经把一台名为Iris的机器人带到公园,陪伴72岁的老人Diane。久而久之,Diane养成了一个习惯,每次到公园开口问的第一句话就是:“Iris在哪里?”因为Iris会一遍又一遍听她讲同一个故事,从不打断,也不会厌倦,这样的陪伴常常让Diane感动落泪。
Liphardt说:“Iris只是塑料、金属和软件组成的,但这件事,让我觉得不可思议。”
或许就是在这样的瞬间,我们能真切感受到具身智能正一步步走出实验室,开始在真实世界留下属于它的印记。
以上就是本次「全球具身智能创新大会」的亮点回顾,期待下次硅谷101的活动现场与大家再相见!
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com