
人形机器人灵巧手:技术突破和商业竞争加速






The following article is from RimeData 来觅数据 Author 来觅研究院
导读:2025 年 4 月 1 日本,宇树科技发布 Unitree Dex5 灵巧的手,单手拥有 20 自由度、94 一个触觉传感器,所有关节都支持平滑的反向驱动(力控)。智能手是各种机器人的重要终端执行器,如人形机器人。随着机器人人气的提高,智能手也受到市场的关注。灵巧手的特点是什么?灵巧手市场现状如何?怎样进行投融资?试着对这篇文章进行分析和讨论。
01 灵巧手特点
灵巧手是一种模仿人手结构和功能的终端执行器,具有很高的灵活性和精确的控制能力。它可以模仿人类手的复杂动作,用于执行各种精细任务。它是人形机器人等各种机器人实现精细操作的关键部件。
灵巧手具有以下特点:(1)自由度高:灵巧手通常具有多个活动关节,可以实现多个自由运动,满足各种复杂的操作要求;(2)多功能性:灵巧手可以完成各种任务,包括抓取、捏合、移动物体、精细加工等。,适应广泛的情况和需求,包括在危险或人类难以到达的环境中工作;(3)传感技术:灵巧手集成各种传感器,为了提高操作的准确性和安全性,可以检测强度、位置、温度等信息。
智能手的构成是实现多功能、灵活、高精度操作的基础。灵巧的手通常由几个关键部分组成,如驱动系统、传动装置、传感器系统和控制系统,技术壁垒极高,因此成为机器人领域最具挑战性的部分之一。为了实现手指的各种运动,驱动系统负责增加动力。传动装置将驱动系统产生的动力转换为手指关节的运动。该系统主要包括螺杆、齿轮、连杆、绳索、腱绳等。其中,腱绳具有适应长距离传动、布局灵活、传动灵活的特点,在实践中应用广泛。传感器系统主要包括触感、力觉、相位传感器等,从而实现对外部目标物体和环境的感知。控制系统是通过算法和软件精确控制驱动系统、传动装置,确保复杂的任务完成。
智能手有各种类型。如果按驱动形式分为电机驱动、液压驱动、气压驱动和形状记忆合金驱动。其中,电机驱动是目前智能手的主要驱动形式,具有体积小、控制力强、导出扭矩稳定等特点。
图表 1:灵巧手的驱动形式概述
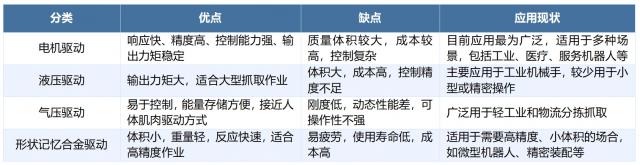
资料来源:公开资料,来找数据整理
如果按传动装置分类,主要分为腱绳传动、连杆传动、齿轮传动和丝杠传动,其中腱绳传动方案具有重量轻、自由度高的优点,是目前的主流传动方案。但由于不同传动方案的优点不同,不同厂家选择的传动装置技术也不同。同时,一些制造商使用各种传动方案(例如特斯拉 Optimus)。
图表 2:灵巧手的传动方式概述

资料来源:公开资料,来找数据整理
灵巧手是人形机器人的关键部件之一。灵巧手的重要性主要表现在:(1)提高操作技能:灵巧手可以模仿手的认知能力,准确抓取和操作物体,如安装和叠放衣物;(2)增强环境交互能力:在人机交互场景下,灵巧手可以提供握手、递物等更自然友好的交互技术,增强客户体验;(3)提高感知能力:灵巧手集成了多种传感器,可以感知环境的变化。帮助人形机器人更好地了解周围环境,提高操作安全性;(4)拓展应用场景:灵巧手是人形机器人在工业制造、医疗卫生、家政服务等领域发挥有效作用的关键部件。同时,随着灵巧手性能的提高,人形机器人的使用场景也在不断拓展,预计未来将在太空探索、深海探测等极端环境下进行任务。
此前根据浙商证券的计算,在工业化初期和工业化成熟阶段,人形机器人手灵巧。 BOM(制造某种商品所需的所有材料成本总和)各自的成本比例为 12%、14%。可以看出,随着人形机器人的不断成熟,灵巧的手在 BOM 在成本中所占的比例也将进一步提高。
图表 3:人形机器人 BOM 成本占比
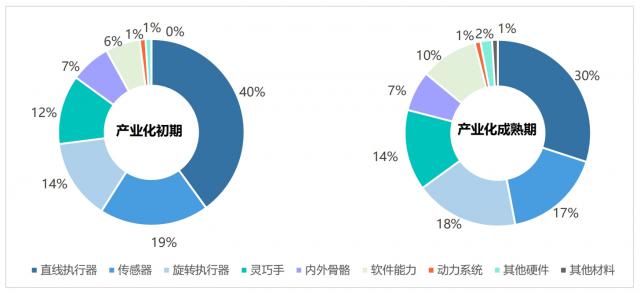
资料来源:特斯拉 AI Day、X 平台,浙商证券,来找数据整理
02 灵巧手现状
在这个阶段,灵巧手已经取得了很大的进步。就技术而言,目前市场上大多数灵巧手都达到了目标。 0.1 实现高自由度运动的毫米级动作精度,可以完成抓握、安装、旋转等高难度操作。与此同时,厂家选择先进的材料和优化设计,使灵巧的手在保证强度和性能的基础上,重量更轻,体积更小。就应用领域而言,灵巧手已经应用于工业、医疗、家庭、航天工程等领域。例如,在医疗领域,灵巧手被用于手术机器人,通过远程控制灵巧手,医生可以更精确地进行手术,减少对病人的创伤。
灵巧手领域竞争激烈。目前灵巧手业务主要有三类参与者,包括人形机器人零部件制造商、人形机器人制造商、大学和科研机构。
人形机器人零部件制造商之前在机器人零部件领域积累了很多,其业务包括R&D和生产电机、传感器、传动系统等零部件。随着灵巧手工业的发展,通过整合自身零部件资源和技术,利用自身在零部件技术和生产方面的优势,将业务拓展到灵巧手工业领域,开发灵巧手工业产品。比如兆威机电有限公司是国内微传动的龙头企业,拥有深厚的技术积累和成熟的精密传动技术生产技术,依托自身技术积极布局人形机器人灵巧手领域的相关产品。
图表 4:人形机器人零部件制造商的灵巧手产品概况(不完全统计)

资料来源:公开资料,寻找资料
人形机器人本身具有较强的技术整合能力,并根据实际使用场景设计灵巧的手,满足特定任务的需要。很多整机厂商,如星动时代、法术原子、智能机器人等,都开发了自己的智能手。一方面,作为人形机器人的关键部件,智能手的技术实力直接关系到人形机器人的综合性能和应用领域的拓展,整机厂商将其作为技术创新和差异化竞争的关键领域。同时,自主研发的灵巧手也有助于企业在技术上取得突破,提高灵巧手的性能和可靠性,降低采购成本,避免因依赖外部供应商而面临技术瓶颈和供应风险。
另一方面,这也在一定程度上说明了人形机器人市场的激烈竞争。为了根据不同的使用场景定制灵巧手的功能和性能,提高人形机器人的适应性,满足用户的个性化需求,整机厂商必须掌握核心部件的研发,从而在竞争中占据优势。但是很多厂商自己开发灵巧手,其实说明灵巧手的技术路线还是有“不确定性”的,行业对灵巧手的技术路线还没有达成共识。
图表 5:人形机器人本身制造商的灵巧手产品概况(不完全统计)

资料来源:公开资料,来找数据整理
腾讯等高校和科研机构 Robotics X 实验室(推出) TRX - Hand 灵巧手)等。,一般都有很强的R&D实力和创新意识,不断探索新的技术路线和设计理念,重视在基础科学和前沿技术领域的探索,为灵巧手技术的发展提供理论支持和技术实力。
同时,我们也可以从宇树科技发布的最新版本 Unitree Dex5 灵巧手观察国内灵巧手的技术进步。Unitree Dex5 灵巧的手单手拥有 20 个自由度(16 主动 4 被动)、94 一个触觉传感器,它的所有关节都支持平滑的反向驱动(力控)。去年 5 月宇树科技发布第一代灵巧手商品 Dex3-1,这只灵巧的手是三指灵巧的手,拥有 7 个体自由,负荷 0.5kg-20kg,可以完成简单的抓取、放置等任务。
这次宇树科技 Dex5 在灵巧手的视频中,我们可以看到它的第二代灵巧手增加到了五指,同时进一步升级了自由度、驱动形式和感知系统。一般而言,灵巧手的自由度较高,则该灵活性较强,所以具有 20 个自由度的 Dex5 灵活性大大提高,可以实现抓、抛、捏、接、扭等操作,视频中还展示了打牌、玩魔方、翻书等操作。
总的来说,我国灵巧手技术在自由度、触觉感知、驱动技术等方面不断突破。目前,行业正处于技术突破和商业化的关键阶段。
从全球竞争格局来看,灵巧手领域的竞争格局呈现出欧美厂商领先、国内厂商迅速崛起的趋势。在海外,欧美厂商在灵巧手领域仍然具有领先优势,例如英国。 Shadow Robot、德国 Schunk、意大利 Qbrobotics 等。与此同时,特斯拉 Optimus 灵巧的手可以支持繁杂的操作,如运输、安装等,它以紧凑的设计、轻量化、高性价比等特点成为市场的新力量。灵巧的手从特斯拉 Gen1 到 自由度从Gen3的数量来看 11 个增加至 22 个,逐渐接近人手 24 其操作灵活性不断提高。
在国内,智源机器人、星动时代、因时机器人等国内厂商正在崛起。技术路径多样,成本优势明显,产品类别丰富,市场竞争力不断提升。其中,因时机器人是中国第一家实现商业量产的灵巧手公司,也是第一家将灵巧手价格降至1万元水平的公司,进一步推动了中国灵巧手的商业化进程。
据 QYResearch 调研,2023 全球前五大机器人灵巧手生产商为 Shadow Robot、Tesla ( Optimus ) 、由于时机器人,北京,BrainCo、SCHUNK ,合计占据约 47.0% 市场份额。预计在全球灵巧手领域,随着国内厂商技术的不断突破和商业化进程的加快,其市场份额将逐步上升。
另外,从行业发展前景来看,根据亿欧智库的计算,在乐观的前提下,全球机器人灵巧手市场规模有望在 2027 年达到 52.5 亿元,并在 2032 年提升至 1,038 一亿元,复合增长率为 81.6%。灵巧手市场也将迎来快速增长,因为机器人的人气持续上升。
03 灵巧的手投融动态
近年来,灵巧手作为人形机器人的重要终端执行器之一,在人形机器人飞速发展的背景下,也受到了众多资本的青睐。2024 到目前为止,国内终端执行器(包括灵巧手、爪子等)的融资案例已经超过 20 起步,融资总额超过 30 一亿元,整体以初期融资为主,行业仍处于快速发展阶段。
从投资者的角度来看,深圳创投、达晨财智、北京国家管理等多家知名投资机构参与了灵巧手等终端执行器的投资。与此同时,许多知名公司(如美团和阿里)也通过投资加快了在这一领域的布局。此外,这一领域的融资在一定程度上表现出马太效应的特点,宇树科技和智源机器人的融资金额占比超过 60%,资本倾向于技术壁垒高、商业化快的企业。
下表是 2024 到目前为止,终端执行器跑道主要是投融事件,有兴趣的读者可登录 Rime PEVC 该平台在终端执行器领域获得全额融资案例、投资项目和深度数据分析。
图表 6:2024 到目前为止,终端执行器跑道主要投融事件超过1亿元。

资料来源:寻找资料
近期推荐热文
本文的内容是基于寻找可靠的公开数据或实地调查数据。我们力求本文内容的客观性和公正性,但不保证或隐含本文中提到的信息、观点和数据的真实性、可靠性、时效性和完整性,也不承担相关法律责任。受研究方法和数据获取资源的限制,本报告的所有内容仅供参考,对任何人的投资、商业决策、法律等操作都不构成任何建议。任何时候,对于因参考本报告而产生的任何影响和后果,寻找数据都不承担任何责任。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com